3dnews.ru: массовое появление робомобилей породит необходимость трансформации инфраструктуры хранения и обработки данных
На сайте "3dnews.ru" опубликована статья С. Карасёва "Intel: каждый робомобиль будет генерировать в среднем 4 Тбайт данных в день". Полностью с материалом можно ознакомиться по ссылке.
Корпорация Intel говорит о том, что массовое появление роботизированных автомобилей породит необходимость трансформации инфраструктуры хранения и обработки данных.
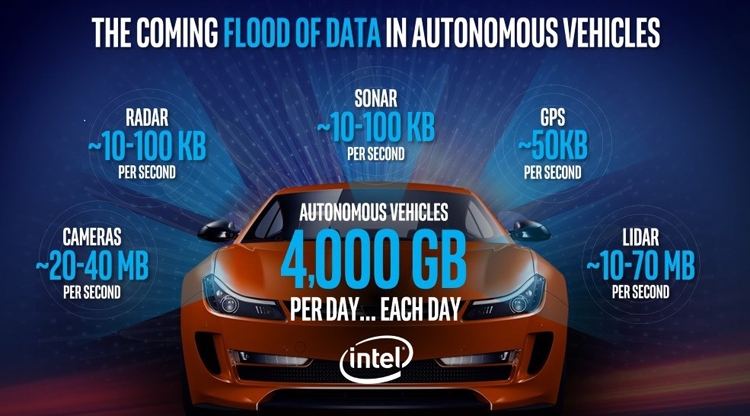
По сути, каждое самоуправляемое транспортное средство будет представлять собой источник нескончаемой информации. В среднем один робомобиль будет генерировать 4 Тбайт данных в день. Это информация от камер, радаров и лидаров, приёмника GPS и других сенсоров.
Главная задача заключается в том, чтобы научиться извлекать пользу из этого огромного объёма информации и создать технологии, на базе которых машины будущего смогут думать, учиться и принимать решения без вмешательства человека.
Весь поток информации от беспилотных автомобилей можно разделить на три группы: технические данные, данные краудсорсинга и персональные данные. К первому типу относятся данные, поступающие от различных сенсоров и формирующие картину окружающего мира, как его «видит» автомобиль. Очень важно обеспечить моментальное поступление технических данных в облака, чтобы их могли использовать и другие машины в рамках сети.
Данные краудсорсинга — это массив информации, накапливаемый в результате объединения данных от машин, находящихся в пределах одного района. Эти данные позволяют делать выводы о загруженности дорог или изменении дорожных условий.
Наконец, к персональным данным относятся сведения о привычках автомобилиста, его предпочтениях, стиле вождения и т. п.
Экспоненциальный рост объёмов данных потребует огромных вычислительных мощностей для упорядочивания, обработки, анализа, понимания, хранения и передачи информации. Обычный компьютер с этим точно не справится — задача под силу лишь мощным центрам обработки данных. Но и их придётся адаптировать под специфику робомобилей.
Дело в том, что обучение беспилотных автомобилей должно происходить максимально быстро: как только датчики идентифицируют новую дорожную ситуацию, системы машинного обучения, имитации и совершенствования используемых алгоритмов должны мгновенно выдавать готовое решение. При этом доработанная модель управления должна сразу же поступать в автомобиль. Кроме того, должны учитываться вопросы обеспечения информационной безопасности.
В любом случае, новые системы должны поддерживать масштабирование по мере роста нагрузки. Это касается как технологий внутри самих машин, так и архитектуры дата-центров.