Спутник ДЗЗ ALOS. Уникальные возможности съемочной аппаратуры PRISM
Геометрические характеристики изображений, полученных оптической системой PRISM, установленной на КА ALOS, позволяют использовать их для создания ортофотопланов масштаба 1:10000, а сформированные системой стереопары могут найти применение для камерального дешифрирования и получения цифровых моделей местности
М.А. Болсуновский (ЗАО «Совзонд»)
А.В. Беленов (ЗАО «Совзонд»)
Введение
Космический аппарат ALOS (Advanced Land Observation Satellite, Япония) был запущен 24 января 2006 г. с космодрома Танегашима. Владельцем спутника является Японское аэрокосмическое агентство (JAXA). Спутник выведен на солнечно-синхронную орбиту высотой 691,65 км. В составе его оборудования радар L-диапазона (PALSAR), предназначенный для круглосуточного и всепогодного наблюдения Земли и формирующий изображения с разрешением 10 100 м, картографическая стереокамера (PRISM), позволяющая получать снимки с разрешением до 2,5 м, а также мультиспектральная камера (AVNIR-2) для цветной съемки с разрешением 10 м. Данные, полученные со спутника, могут быть использованы для картографирования, мониторинга природных ресурсов, а также проведения научных исследований.
Специалистами компании «Совзонд» в тестовом режиме проведена фотограмметрическая обработка изображений, отснятых аппаратурой PRISM (Panchromatic Remote-sensing Instruments for Stereo Mapping), основным предназначением которой является получение материалов с целью создания высокоточных цифровых моделей рельефа местности для картографирования в масштабе 1:25 000. Характеристики стереокамеры приведены в табл. 1.
Таблица 1. Характеристики съемочной аппаратуры PRISM
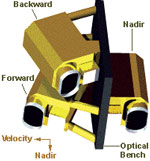
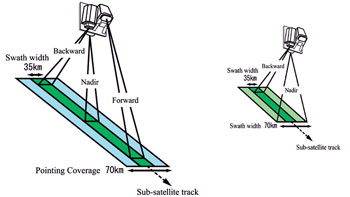
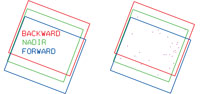
Конструктивными особенностями съемочной аппаратуры PRISM являются установка на одной платформе съемочных камер (рис. 1), обеспечивающих получение стереопар изображений с пространственным разрешением 2,5 м размером 35х35 км в комбинации Nadir-Backward, Nadir-Forward и Backward-Forward в режиме Normal, а также возможность формирования изображения, полученного камерой Nadir, в специальном режиме Observation (рис. 2) размером 70х35 км.
Рис. 2. Режимы съемки Normal и Observation
Цель тестовой работы
Целью тестовой фотограмметрической обработки изображений, полученных съемочной аппаратурой PRISM, было определение геометрических характеристик как одиночных снимков, так и стереопар.
Исходные данные приведены в табл. 2.
Таблица 2. Параметры изображений, полученных съемочной аппаратурой PRISM в режим Normal
Расположение опорных и контрольных точек в проекции UTM-36N и системе координат WGS 84 приведены на рис. 3.
Рис. 3. Схема перекрытия изображений PRISM и расположение опорных точек
Фотограмметрическая обработка пары перекрывающихся изображений в комбинации Nadir-Backward
Основные этапы:
1. Расчет приближенной модели сенсора для каждого из изображений, образующих стереопару, по следующим параметрам:
высота орбиты;
период обращения;
наклонение орбиты;
мгновенное поле обзора оптической системы;
эксцентриситет орбиты;
географическое положение центрального элемента изображения;
размер пикселя изображения на местности.
2. Измерение опорных и контрольных точек, в процессе которого определены координаты 9 опорных и 8 контрольных точек в системе координат снимка.
3. Уточнение модели сенсора для каждого снимка стереопары по опорным точкам (ориентирование стереопары), оценка точности.
Точность фотограмметрической модели стереопары, рассчитанной по опорным точкам, была оценена по расхождениям между вычисленными и заданными координатами опорных и контрольных точек и не превысила 0,5 пикселя изображения (табл. 3).
Среднее значение ошибки для опорных точек составляет: 1,0 (ось X), 1,8 (ось Y) и 2,1 м (ось Z), для контрольных точек: 1,2 (ось X), 1,3 (ось Y) и 2,1 м (ось Z).
4. Построение цифровой модели местности по паре перекрывающихся изображений выполнялось в автоматическом режиме с использованием алгоритмов корреляции без последующих сглаживания и фильтрации.
Таблица 3. Значение расхождений на опорных и контрольных точках (стереопара)
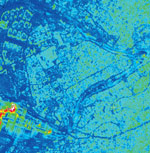
На рис. 5 приведен фрагмент цифровой модели местности с шагом 2,5 м, построенной по стереопаре Nadir Backward.
Рис. 5. Цифровая модель местности
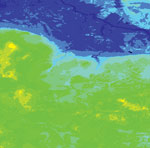
Рис. 6. Фрагмент цифровой модели рельефа местности
Фотограмметрическая обработка одиночного снимка
Основные этапы:
1. Расчет приближенной модели сенсора по следующим параметрам:
высота орбиты;
период обращения;
наклонение орбиты;
мгновенное поле обзора оптической системы;
эксцентриситет орбиты;
географическое положение центрального элемента изображения;
размер пикселя изображения на местности.
2. Измерение опорных и контрольных точек, в процессе которого определены координаты 15 опорных и 10 контрольных точек в системе координат снимка.
3. Уточнение модели сенсора по опорным точкам (ориентирование одиночного снимка).
Точность модели сенсора, рассчитанной по опорным точкам, была оценена по расхождениям между вычисленными и заданными координатами опорных и контрольных точек и составила 0,3 пикселя изображения (табл. 4).
Таблица 4. Значения расхождений на опорных и контрольных точках (одиночный снимок)
Средняя квадратическая ошибка (СКО) для опорных точек составляет: 0,92 и 0,86 м по осям X и Y соответственно, для контрольных точек: 1,71 и 2, 53 м по осям X и Y соответственно.
4. Ортотрансформирование. На этом технологическом этапе выполнены:
преобразование цифровой модели местности в цифровую модель рельефа путем фильтрации искусственных высотных объектов и последующей интерполяции высот по соседним значениям. Фрагмент результирующей цифровой модели рельефа представлен на рис. 6;
ортотрансформирование изображения с использованием модели сенсора и полученной модели рельефа местности;
оценка точности ортотрансформированного изображения по опорным и контрольным точкам.
Точность полученного ортотрансформированного изображения определялась путем сравнения измеренных на нем координат опорных точек с их заданными значениями. Расхождение координат для опорных и контрольных точек не превышает 4 м.
Заключение
По результатам тестовой фотограмметрической обработки можно сделать вывод, что геометрические характеристики изображений, полученных оптической системой PRISM, установленной на КА ALOS, позволяют использовать их для создания ортофотопланов масштаба 1:10 000, а сформированные системой стереопары могут найти применение для камерального дешифрирования и получения цифровых моделей местности с точностью не хуже 3 м.
Рис. 7. Контроль точности ортотрансформированного изображения по опорным точкам
Полученные оценки полностью соответствуют заявленным характеристикам разработчиков аппарата и обусловлены, прежде всего, следующими факторами:
высокоточной (2х10 4 градуса каждые 5 с) стабилизацией угловых перемещений аппарата, обеспечивающей геометрическую точность по полю изображения не хуже 2,5 м;
точным (до 0,2 м) определением положения аппарата;
использованием зеркального объектива без хроматических аберраций по полю обзора.