Преимущества интеграции средств спутникового позиционирования и инерциальных измерительных устройств
Обеспечение высокого уровня работы (как с точки зрения точности, так и с точки зрения оперативности), простота интеграции оборудования делают технологию SPAN идеальной для желающих улучшить эффективность решений в сложных условиях, извлекая при этом пользу из высокой производительности
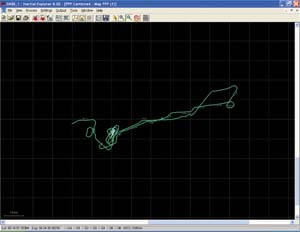
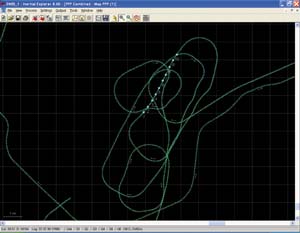
На рис. 1 и 2 представлены соответственно общая траектория полета и фрагмент траектории с нанесенными маркерами срабатывания затвора камеры.
Рис. 1. Общая траектория полета
Данные совместных измерений приемника ProPak-V3-424 и БИИ iMar FSAS обрабатывались в программном обеспечении Inertial Explorer тремя различными алгоритмами: Precise Point Positioning (PPP), Differential GNSS и Tightly Coupled IMU.
Рис. 2. Фрагмент траектории с нанесенными маркерами срабатывания затвора
Алгоритм PPP позволяет проводить постобработку измерений приемника спутникового позиционирования без использования данных от базовых станций. В качестве дополнительной информации используются параметры точных орбит и поправки часов, которые вычисляются по данным контрольных станций слежения и выкладываются на специализированном FTP-сервере.
Алгоритм Differential GNSS позволяет проводить постобработку измерений приемника спутникового позиционирования с использованием данных от постоянно действующих научных базовых станций. Используются файлы измерений в формате RINEX, которые формируются на основе «сырых» измерений и выкладываются на специализированном FTP-сервере.
Алгоритм Tightly Coupled IMU позволяет получить жестко связанное решение данных приемника ProPak-V3-424 и БИИ iMar FSAS. В качестве дополнительной информации используются файлы измерений постоянно действующих научных базовых станций в формате RINEX, которые формируются на основе «сырых» измерений и выкладываются на специализированном FTP-сервере.
В каждом из алгоритмов для получения доступа к данным, выложенным на сервере, используется утилита, которая входит в ПО Inertial Explorer. Доступ к данным бесплатный.
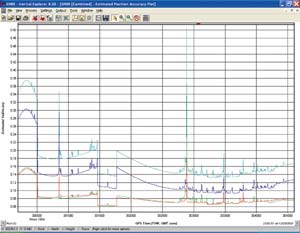
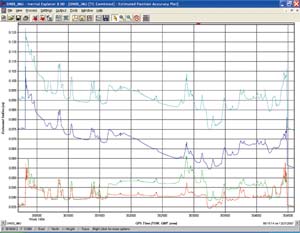
Графики оценки точности в зависимости от времени съемки, условий измерений и алгоритмов обработки приведены на рис. 3–6.
Рис. 3. Оценка точности при обработке данных по алгоритму PPP
На рис. 3 и 4 четко прослеживаются пики снижения точности из-за потери сигнала от спутников и срывов фазовых измерений при разворотах для захода на съемочный маршрут. На рис. 5 хорошо видно, что крен во время разворотов для захода на посадку доходил до 30–32°, что хорошо для экономии топлива и времени и плохо для точности данных. На рис. 6 за счет использования данных БИИ, которые позволяют с высокой точностью восстановить потерянные фазовые измерения, пики снижения точности почти отсутствуют, точность измерений на порядок превышает точность измерений, полученную по двум другим алгоритмам.
Рис. 4. Оценка точности при обработке данных по алгоритму Differential GNSS
Таким образом, использование комплекса позволяет не только повысить точность и надежность позиционирования данных, но и обеспечить снижение затрат времени и материалов.
Рис. 5. Угол крена в зависимости от времени
Для вычисления координат центров фотографирования были использованы линейные элементы редукции, которые вычисляются по чертежам или измеряются непосредственно на борту и позволяют автоматически редуцировать координаты фазового центра антенны к центру фотографирования.
Рис. 6. Оценка точности при обработке данных по алгоритму Tightly Coupled IMU
При обработке данных по алгоритму Tightly Coupled IMU были также учтены угловые элементы редукции, определенные БИИ. Использование двух наборов элементов редукции (линейных и угловых) позволяет повысить точность результатов.
Наличие координат центров фотографирования, углов крена и тангажа на момент срабатывания затвора (измеряются БИИ), угла сноса (вычисляется) значительно упрощает дальнейшую обработку материалов фото- и тепловизионной съемки, повышает их точность (рис. 7).
Рис. 7. Угловые и линейные параметры движения авианосителя
Полевые летные испытания подтвердили преимущества использования комплекса позиционирования данных фото- и тепловизионной аэросъемки на основе технологии SPAN компании
NovAtel. Привязка центров фотографирования с точностью до 12 см, получение углов крена, тангажа и сноса позволяют значительно повысить качество и точность получаемых данных, рассчитать проекцию поля зрения фотокамеры и тепловизора.
Применение в составе комплекса блока инерциальных измерений iMar FSAS и программного обеспечения Inertial Explorer для получения жестко связанного решения приемника спутникового позиционирования и БИИ дает возможность при заходах на маршруты экономить топливо и время за счет снятия ограничений на угол крена.
Как показали результаты тестов, добавление инерциальной составляющей к комплексу для спутникового позиционирования сказывается на качестве данных и надежности работы в условиях, где только сигнала спутника недостаточно.
В периоды, когда видимость спутников отсутствовала, технология SPAN обеспечивала выдачу значений координат, скорости и элементов ориентирования. Однако с течением времени сдвиги и помехи измерений IMU начинают сказываться на общем решении. Поэтому во время частичной видимости спутников необходимо контролировать скорость ухода за счет фазовых обновлений, что будет способствовать поддержанию соответствующей точности даже в течение продолжительной потери сигнала.
Обеспечение высокого уровня работы (как с точки зрения точности, так и с точки зрения оперативности), простота интеграции оборудования делают технологию SPAN идеальной для желающих улучшить эффективность решений в сложных условиях, извлекая при этом пользу из высокой производительности.