Превосходство цифровых камер над их аналоговыми (пленочными) предшественниками уже не вызывает сомнения практически ни у кого. И дело не только в том, что цифровые изображения проще и быстрее обрабатывать, а их качество можно улучшать программно еще на этапе получения. Цифровые камеры достигли, наконец, соизмеримого с пленочными уровня пространственного разрешения получаемых снимков. В 2008 г. компания Microsoft-Vexcel Imaging GmbH (Австрия) представила новую широкоформатную камеру серии UltraCam с порядковым обозначением X Prime (Xp) и рекордным в своем классе разрешением 196 мегапикселов (17 310x11 310 пикселов). Конечно, изображение, получаемое при сканировании негатива формата 23х15 см с шагом 13 мкм, имеет большее разрешение, но это преимущество уже не столь значительно.
Цель предлагаемой статьи — не декларация превосходства как такового цифровых камер над пленочными или сравнение цифровых камер разных производителей, а освещение опыта конкретной компании по использованию широкоформатных цифровых камер серии UltraCam.
Фотограмметрический комплекс UltraCam-X работает под управлением навигационной системы CCNS4 производства IGI GmbH (Германия), которая состоит из блока навигации и управления (Standart CCNS) и блока геопозиционирования (AeroControl). Информация о полете выводится на два идентичных 5-дюймовых дисплея. Ввод команд может осуществляться как оператором, так и пилотом с помощью управляющих кнопок мониторов, что позволяет опытному летчику более эффективно организовать съемку и даже выполнять ее самостоятельно.
Основные параметры полета отображаются в центре рабочего пространства экрана вместе с маршрутом и индикаторами положения воздушного судна. Сбоку находится панель вспомогательной информации, вид которой меняется в зависимости от выбранного режима отображения. Сложность освоения и недружественность интерфейса CCNS4 компенсируются повышенной стабильностью, устойчивостью и удобством управления. Даже при потере спутникового сигнала система продолжает работу — ведется запись данных IMU, выдаются управляющие команды на гиростабилизирующую установку и срабатывание затвора, ведется запись временных меток точек фотографирования.
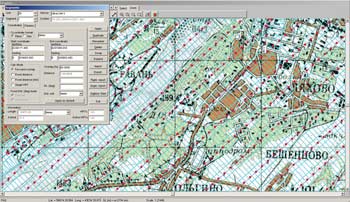
До недавнего времени программное обеспечение для планирования и протоколирования аэрофотосъемки было представлено лишь WinMP (IGI GmbH, рис. 1).
Рис. 1. Окно проекта WinMP с маршрутами и проекциями снимков на земную поверхность
Недавно IGI представлен новый программный продукт — IGIPlan, ориентированный на упрощение процесса работы. Появились поддержка новых форматов ЦМР и растровых изображений, возможность автоматической генерации полетных линий над заданной площадью с учетом рельефа. Проблема влияния высоты местности на пространственное разрешение снимка решена просто — в месте резкого перепада высот программа прерывает существующий маршрут и начинает новый. Одним из основных достоинств продукта разработчики считают интеграцию с Google Earth, где пользователь может обозначить интересующий его контур, а потом использовать его в IGIPlan (рис. 2).
Рис. 2. Маршруты проекта IGIPlan, экспортированные в Google Earth
Система UltraCam состоит из сенсорного блока (SX), устанавливаемого на гироплатформу, и блока управления (CX), где происходит запись данных.
Сенсорный блок осуществляет съемку в панхроматическом, видимом и инфракрасном каналах, причем панхроматическое изображение формируется четырьмя объективами, расположенными друг за другом параллельно направлению движения воздушного судна. Съемка проводится последовательно разными объективами из одной точки пространства, что позволяет получить общий снимок в единой проекции. Главный объектив формирует первое изображение, которое является основой будущего кадра и служит для контроля объединяемых субснимков.
После срабатывания затвора сенсорный блок создает 13 файлов «сырых» изображений, которые передаются в блок управления для записи на жесткие диски.
В последних моделях камер реализован новый принцип хранения данных. Так, в UltraCam-X и -Xp применены съемные накопители большой емкости, дублирующие друг друга. После синхронизации и проверки данных один из накопителей может быть изъят из блока управления для скачивания данных в офисе, а второй остается на борту как контрольный.
При съемке Курска в качестве носителя аппаратуры использовался самолет Ан-2. На его борту кроме UltraCam-X инсталлировался лазерный сканер Litemapper 5600. Хотя оба сенсора работают под управлением CCNS4, организовать их подключение к одной системе не представляется возможным. Дело в том, что инерциальная система сканера жестко зафиксирована относительно воздушного судна, а камера с собственным IMU стабилизируется гироплатформой относительно осей пространства (на основе данных IMU). В результате сведения, поставляемые обеими инерциальными системами, значительно отличаются друг от друга.
В Standard CCNS имеется возможность подключения двух сенсоров и управления ими, но предпочтительнее установить дополнительный модуль навигационной системы, подключаемый к сканеру. Это позволяет отслеживать большее число параметров.
Совместное использование широкоформатного цифрового АФА и лидара дает неоспоримое преимущество в скорости обработки данных, что сказывается на времени подготовки конечной продукции. Именно по этой причине в качестве носителя был выбран самолет Ан-2. Низкая (по сравнению с другими воздушными судами) стоимость летного часа, возможность работы в неблагоприятных условиях, большая вместимость делают этот летательный аппарат наиболее пригодным для выполнения воздушной съемки.
Для съемки Курска было запланировано 27 параллельных маршрутов на высоте 750 м (рис. 3). Масштаб аэросъемки составил 1:7000, пространственное разрешение снимков было не хуже 5 см. По предварительным расчетам на съемку маршрутов должно было потребоваться 4 ч 35 мин. Практически было затрачено 5 ч, не считая времени подлета.
Рис. 3. Полетный план съемки Курска
Съемка проведена в мае 2009 г., на изыскательскую часть проекта с проверкой первичных данных ушло 10 дней.
При подлете к запланированной точке фотографирования навигационная система анализирует, не превышает ли боковое отклонение допустимый предел, и посылает сигнал на срабатывание затвора. В момент экспозиции камера отправляет отклик в CCNS, где в блоке AeroControl записываются точное время, данные GPS и IMU для извлечения параметров внешнего ориентирования снимка при постобработке. В дополнение к ответному сигналу блок управления камеры посылает информацию о статусе снимка (ошибки, предупреждения).
В программе управления камерой (Camera Operating System — COS) осуществляется настройка проекта, в который будут сохраняться снимки, а во время полета выбираются значение выдержки и размер диафрагмы. Здесь же происходит контроль качества получаемых изображений c помощью функции предварительного просмотра. Информация об освещенности снимаемой местности отображается на специальной шкале.
Основным недостатком системы является невозможность корректировать параметры съемки в режиме реального времени.
Сложность управления камерой компенсируется составом формируемых данных и широкими возможностями редактирования снимков.
Постобработка полученной информации разделяется на два независимых цикла: навигационные данные обрабатываются в программах AeroOffice (IGI GmbH) и GrafNav (NovAtel, Inc., Канада), синтез снимков, их геометрическая и радиометрическая коррекция проводятся в программном комплексе Microsoft Office Processing Center (OPC).
После расчета корректной GPS-траектории проводится ее уточнение на основе данных IMU. Выходным продуктом является так называемый IML-файл, в котором хранится информация о пространственных координатах и ориентации каждого снимка.
По технологии обработки в OPC данные делятся на три уровня. Нулевой уровень — это снимки, скопированные из накопителей на компьютер. Кадры по-прежнему представляют собой 13 изображений и не пригодны к использованию. С нулевого по второй уровень обработка данных в OPC происходит практически без участия пользователя. На первом уровне выполняется корректировка яркости и контрастности отдельных изображений кадра в соответствии с калибровочным профилем камеры. На втором уровне осуществляется генерация панхроматического кадра из девяти «сырых» изображений, при этом калибровочный профиль камеры используется для геометрической интерполяции на стыках изображений снимка. Также происходит связывание координатных систем панхроматического и спектральных снимков.
Данные третьего уровня обработки представляют собой геометрически и радиометрические откорректированные полноцветные снимки. На этапе обработки пользователь выбирает тип увеличения четкости изображения (pansharpening) — RGB, CIR, Grayscale, а также проводит необходимые настройки для улучшения качества изображения. Программа предоставляет инструменты для контроля и анализа отдельных снимков проекта. На рис. 4 приведен пример обработки затемненного снимка района Курска. Для получения приемлемого результата использовались настройки каналов, исключающие потерю информации при повышении яркости и контрастности изображения. Эффекты виньетирования, присутствующие на кадре, устранялись путем использования специализированного инструмента OPC — Dodging. К результирующему изображению применялась специально подготовленная кривая градации.
Рис. 4. Снимок UltraCam-X до обработки (а) и после радиометрической коррекции (б)
После обработки цифровые фотоснимки вместе с облаками точек лазерного сканирования были использованы для построения ортофотопланов районов Курска. Полученные планы отличаются высокой точностью и детальностью (рис. 5).
Рис. 5. Фрагмент ортофотоплана
Следует подчеркнуть, что данные, получаемые цифровыми аппаратами класса UltraCam, позволяют ощутимо ускорить и упростить фотограмметрическую обработку информации. А создание ортофото- и топографических планов на основе комплексной съемки с лидарами сводит к минимуму дорогостоящие полевые изыскания. Немаловажным является тот факт, что используемое при съемке и постобработке программное обеспечение автоматизирует многие процессы, уменьшая влияние человеческого фактора.